



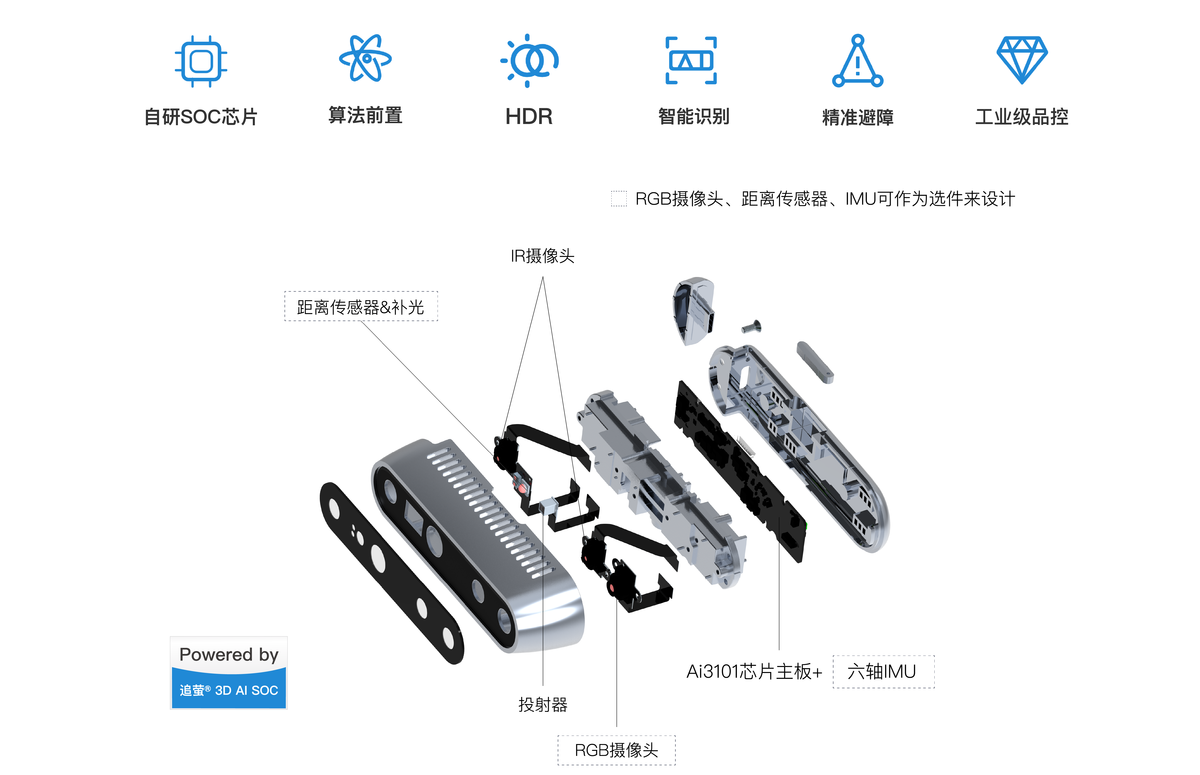
R50深度相机
基于自主开发的SOC芯片,内置ISP、HDR、 NPU、3D深度引擎(深度计算的融合加速器)、VSLAM加速引擎。搭载自主知识产权的3D视觉算法和3D视觉重构技术,可快速准确获取目标的三维信息,适用于中远距离人机交互、物体识别、空间建模、避障导航等。利用三维深度信息构建三维地图,提供RGBD深度图或点云图,支持ROS系统,可广泛应用于商用机器人、扫地机、AR/VR等智能场景。
规格参数
处理器:埃瓦自研SOC(CPU+NPU+3D)
探测距离:0.3米至5米(随照明条件而变化)
相对深度精度:≤ 2% @2M
深度图技术:支持双目或双目结构光
深度分辨率: 640x480 @25fps,640x400 @25fps,320x240 @30fps,
60fps,320x200 @30fps,60fps 等。深度图与RGB 同时输出:640x400 深度+720p color@25fps
功耗:<2W
接口:USB



 沪公网安备31011502401537号
沪公网安备31011502401537号